

- 2019-12-26
- 研究・技術紹介
- FaSTAR, Pixhawk, VTOL(Vertical Take-Off and Landing Aircraft:垂直離着陸機), ドローン, ヘリコプター, マルチコプター型ドローン, ミューオン触媒核融合, ラムジェットエンジン, 三浦幸平, 三菱重工業株式会社, 中部大学, 宇宙航空研究開発機構(JAXA), 棚橋美治, 水空両用固定翼無人航空機, 知の拠点あいち, 空飛ぶペンギン, 航空機電動化(ECLAIR)コンソーシアム, 電動無人機, (公財)科学技術交流財団

近年様々なシーンで活用されているドローンに対して、固定翼の揚力を生かして消費電力削減により飛行時間を延ばし、被災地の物資輸送や海洋河川調査へ活用する研究を行っているのが、中部大学 工学部 宇宙航空理工学科の棚橋研究室だ。現在は「空飛ぶペンギン」と呼ぶ電動無人機(翼付きドローン)に関する研究を進めている。中部大学に着任される以前は、三菱重工業株式会社 名古屋航空宇宙システム製作所にて、流体工学を中心とした研究に携わっていたという棚橋教授に、お話を伺った。(執筆:後藤銀河)

中部大学 工学部 宇宙航空理工学科教授 棚橋美治氏
――はじめに、研究テーマについて教えてください。
[棚橋教授]テーマは大きく分けて二つあります。一つは「空飛ぶペンギン」と呼んでいる電動無人機、正式には「水空両用固定翼無人航空機」の開発です。自動車業界ではEV化が進んでいますが、航空機業界も同様に、国内では宇宙航空研究開発機構(JAXA)を中心とした産官学連携による航空機電動化(ECLAIR)コンソーシアム等の取り組みが行われています。
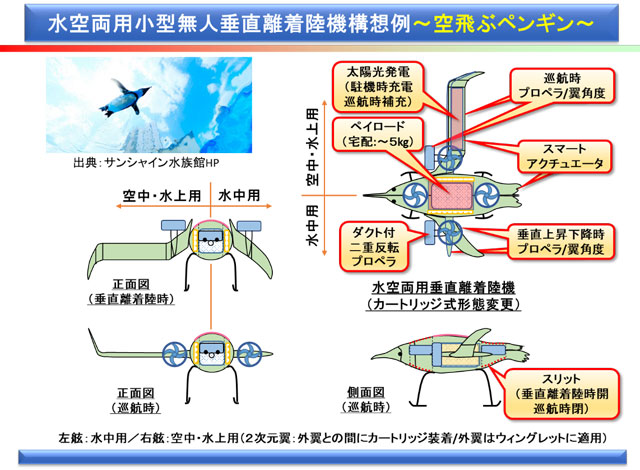
ドローンのように飛行し、水中にも対応する「空飛ぶペンギン」。
[棚橋教授]当研究室では、交通の不便なところ、特に被災地に対して迅速に支援物資が届けられるよう、滑走路がないところでも使えるVTOL(Vertical Take-Off and Landing Aircraft:垂直離着陸機)方式の翼付きドローンを開発しています。垂直に離陸して、4、50キロ先まで飛んで行けること、2時間ほどで700ha位の広範囲の被災状況を調べられることを目指しています。
そして、もう一つの研究は、核融合発電の新手法の開発です。大学の近隣の岐阜県土岐市に核融合科学研究所があるため、本学にも関係する先生方が集まっています。私の専門分野の一つである高速流体に関する知識を核融合に生かすため、研究に参加しています。
流体工学の知識を生かし、無人航空機と核融合発電に挑戦
――航空機と核融合、どのような関係があるのでしょうか。
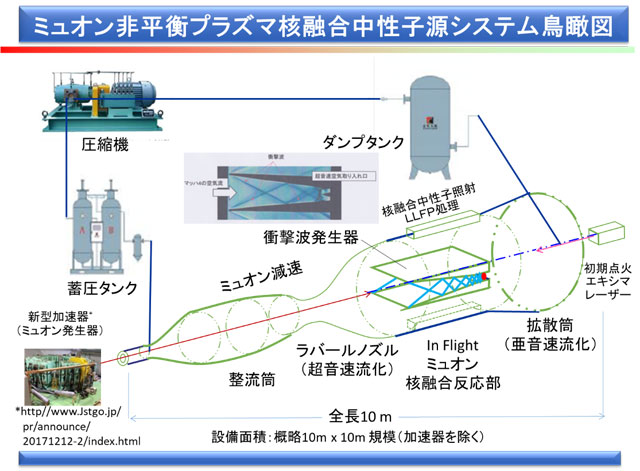
[棚橋教授]これまでの核融合研究では、ヘリカル型やトカマク型と呼ばれる強力な磁場を使って超高温のプラズマを閉じ込める装置を使った磁場核反応が主流です。今やろうとしているのは、これをもっと簡易的にできないか、というものです。具体的には、超音速の気流を使って高圧/高密度の領域をつくりだし、そこにミューオン(負の電荷を持つミュー粒子)を打ち込んで、高効率なガス核融合を起こすミューオン触媒核融合の実現を目指しています。
航空機の設計には、流体工学の知識が不可欠ですが、この流体工学の考え方を核融合に持ち込むという新しいアプローチになります。ラムジェットエンジン(吸入した超音速気流をラム圧により圧縮して燃料を燃焼/推進するエンジン)のコンセプトを使って、超音速中に置かれた「くさび」型の気流取入口で気体を圧縮して内部で衝撃波を発生させ、安定的に高圧/高密度状態をつくり出すというものです。理論的には、磁場核融合よりも2桁低い粒子エネルギーで3桁大きい反応断面積の核融合反応が起こせると言われています。
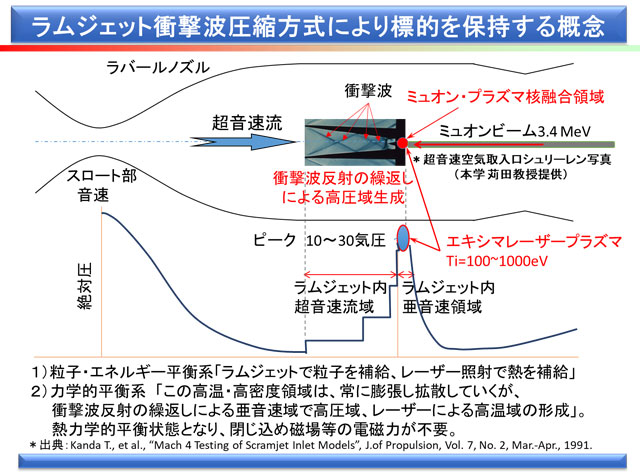
ラムジェットエンジンと同じ原理で気流を圧縮し、核融合に必要な高温/高圧/高密度状態を得る。
[棚橋教授]まだ小型のモデルで実験を始めたところですが、気流中に「くさび」を設けると、ここで衝撃波がたくさん発生して、30気圧程の圧力になります。ここに触媒としてはたらくミューオンビームを打ち込んで、高効率なガス核融合のひな形を作ろうというものです。次のステップでは、茨城県にある「J-PARC」(注:日本原子力研究開発機構と高エネルギー加速器研究機構が共同運営する茨城県東海村の加速器実験施設のこと)にて、本格的な検証をやろうとしています。核融合の燃料には重水素(原子核が陽子1個と中性子1個からなる水素の安定同位体)と三重水素(原子核が陽子1個と中性子2個からなる水素の放射性同位体)を使いますから、安全面でも慎重に進める必要があります。
――核融合の研究の狙いは、原子力発電に代わる発電方法ということになりますか?
[棚橋教授]それもありますが、反応で得られる中性子が重要です。いま原子力発電所の使用済み核燃料など、放射性物質の処理が大きな問題となっています。放射性物質に中性子をぶつけて「核変換」を起こすことで、放射能を減らすことができると考えられています。
飛行機とヘリコプターの長所を併せ持ったティルトウイング機
[棚橋教授]水空両用ドローンと流体力学による核融合という二つのテーマがありますが、学生が研究に携わっているのは主にドローンの開発になります。
広範囲の被災状況を調べられる固定翼型電動ドローンを研究している。
――ドローンというとヘリコプターのような回転翼機をイメージしますが、これは飛行機のような固定翼機なのですね。
[棚橋教授]ヘリコプターや最近注目されているマルチコプター型ドローンのような回転翼機は、空中に浮かぶためにローターを常に回転させる必要があります。飛行機のような固定翼を使えば、翼に揚力が発生しますから、電動モーターの消費電力を抑えながら飛行時間を延ばすことができます。そのため、航続距離や速度を高めることができるというメリットがあります。
空中と水上/水中、両方で使えるもので、被災地に飛んで行って、海中の状況もソナーやカメラで調査できる水空両用機体を考えています。ペイロードは5kg、翼のスパンは3~4m程度の機体で、今は基礎的なシステム構成やミニチュアでの実験を行っています。

「知の拠点あいち」で製作したドローン。ローターからの空気流が、上昇時も前進時も常に翼に沿って流れるデザインだ。最終的には、流れの非対称性がない二重反転ローターを使う予定。
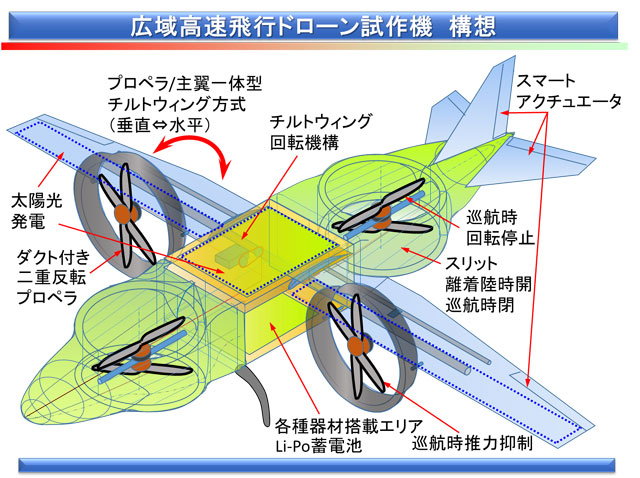
[棚橋教授]このドローンは、愛知県が推進する「知の拠点あいち」の運営機関(公財)科学技術交流財団との契約に基づき、「浸水状況把握のための広域高速飛行ドローンシステム」として試作したものです。
翼が90度回転するティルトウイング機で、マルチコプターのように垂直に上昇した後、翼を傾けることで、前に進みます。イメージはオスプレイ(米軍の輸送機「Bell Boeing V-22 Osprey」)ですね。オスプレイは、主翼は固定式で主翼端にあるプロップローターの角度を変えるティルトローター型です。
翼とローターを一体で回転させるティルトウイング。飛行機のように高速で飛ぶことができる。
[棚橋教授]オスプレイのように翼端でローターが回転していると、上昇時にローターからの風が翼にぶつかってしまいます。回転翼であればローターからの空気流がそのまま翼面に働く揚力となりますから、より効率が良い。もちろん、翼全体を動かす回転機構が必要なので、強度をどう持たせるのかという課題はあります。
――固定翼を使うことで、ドローンよりも速く、遠くまで飛べると伺いました。
[棚橋教授]一般的なマルチコプター型のドローンだと、揚力にかなり電力を使うため、飛行時間は30分程度のものが多いです。固定翼を持たせることで翼の揚力も使えるため、一旦スピードが出るとグライダーのように少ない推力で飛行できます。時速100kmで40~50分飛行できることを狙っています。
――「空飛ぶペンギン」ということは、この機体で水中も対応するということでしょうか?
[棚橋教授]一部の学生は、実験水槽を使って、水中ドローンを研究しています。水中に潜るためには浮力を打ち消す必要もありますが、まずは着水してソナーを下ろし、水中の様子を調査できるようなことを考えています。一度着水すると離水するのに一工夫必要ですが、目標としては3~4年後にそのあたりもクリアしたいと考えています。
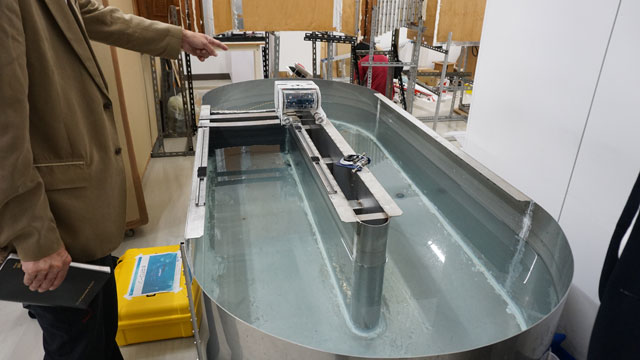
水中での流体力特性を測定するための実験水槽。
――研究室の学生たちは、どのような研究をしているのでしょうか?
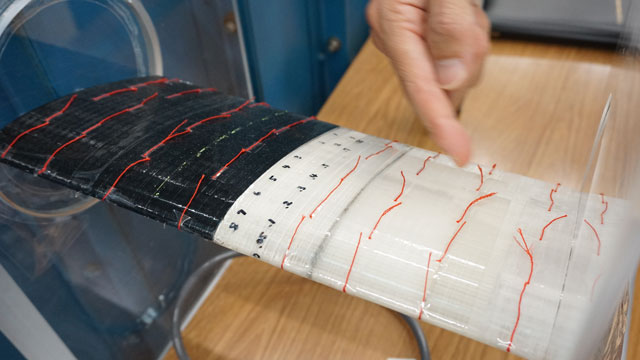
[棚橋教授]2018年12月に新たな実験棟が完成し、そこに風洞実験関係の設備が入っています。測定部寸法が35×35cmで、風速30m出せるものと、50×50cmで最大風速60mのものがあり、これを使って空気の流れを可視化したり、機体に加わる力や圧力を測定したりといった実験を進めています。
具体的にはJAXA が開発した流体解析ソフト「FaSTAR」や市販ソフトを使って、機体周囲の流れの数値シミュレーションを行い、揚力、抗力、モーメントや干渉流れ場を評価しています。ドローンのボディや翼の一部分を切り取って、空力特性の良い形状を検討し、評価したり、スケールモデルを作って風洞実験により全機や各部に加わる力を測ったりして、改善策を探っています。
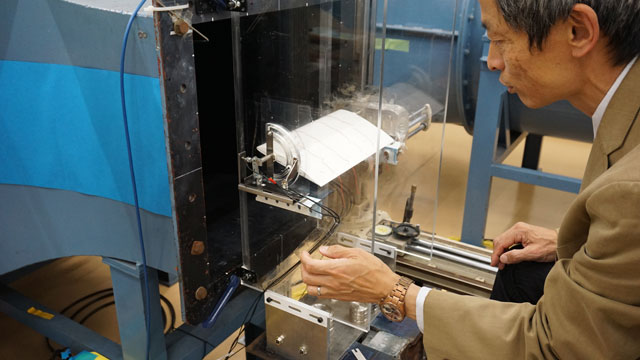
風洞実験設備。翼などのモデルは3Dプリンター等で製作している。
[棚橋教授]形状諸元の原案を策定したあとは、機体をまずは実際に飛ばしてみることですね。小さな模型飛行機を作って、どうやったらうまく飛ばせるか、から始めています。日本航空宇宙学会が2019年9月に開催した「第15回全日本学生室内飛行ロボットコンテスト」に、中部大学から2チームが出場しています。こうした活動を通して飛ばし方の知識を増やし、性能向上のために必要な要素研究に繋げていこうという考えです。
――市販のマルチコプターでも、ちゃんと飛ばすのは難しいのでしょうか?
[棚橋教授]使っているのは海外メーカーのものですが、丁寧な解説書があるわけでもありません。学生に「動かしてごらん」といっても、どこから手を付けていいのかも分からないので、そうそう簡単には飛ばせません(笑)
制御ソフトもメーカー特有のものが使われていますから、どのようにパラメータを振って調整するのか、メーカーのマニュアルを読みながら考える必要があります。それだとちょっと難しいので、制御部を汎用フライトコントローラー「Pixhawk」に置き換えて、飛ばせるようにしています。今は、「空飛ぶペンギン」でも使用している二重反転ローターで実際に飛ばせるところまで来ています。
模型飛行機が飛ばせるようになれば、実際に飛ばしてみた実機のパラメータとシミュレーションとを比較して、より良い性能が得られるよう、空力係数等をチューニングすることになります。これには、飛行制御、運動シミュレーションを三菱重工で長年設計されていた片柳さんが開発した運動解析プログラム「KMAP」というソフトを用いて、コンピュータ上でシミュレーションしながら、フィードバック制御の一種のPID制御(Proportional-Integral-Differential Controller)、ゲインと積分、微分などのパラメータを調整していきます。
機体設計では、翼幅、翼面積、重量といった諸元を策定し、実際に風洞で力を測って、機体形状ごとの特徴を見る。数値計算には、JAXAの高性能流体解析コード等も利用している。
――まず、ドローンや飛行機の模型を飛ばせるようにした上で、このティルトウイング機につなげていくわけですね。確かに、ローターで上昇してから前進するとき、十分な揚力がないと落下してしまいそうです。
[棚橋教授]そうですね。マルチコプターモードと固定翼モードとで、制御を切り替える必要がありますから、そこを上手くつなげるのが次のステップになります。計算上は、これ位のスピードでこれ位の角度にすれば必要な揚力が得られる、という見込みはつけてありますので、実際にスケール模型を使って実証していきます。
――水空両用ドローンと核融合発電の新手法の開発、それぞれのテーマの今後の展望を教えてください。
[棚橋教授]まず、核融合発電については実証のための実験設備を整備している段階です。課題は30気圧の領域を安定的につくるということですね。東北大学との共同研究で、東北大学が理論計算やミクロ的な解析を担い、本学が流体力学を使ってマクロに実証するという分担です。来年にJ-PARCでの検証を行い、5年位を目途に学内に10~20mの設備を作りたいですね。この実験を通して必要な中性子が簡単に取り出せることが示されれば、放射性物質の廃棄物処理に大きく寄与できると考えています。
学内に核融合実験ができる施設の建設を目指している。
[棚橋教授]ドローンも5年位を目途に、災害対策の一環として自治体に導入できるものを作りたいです。まずは実際に使ってもらって、現場からフィードバックを得て、より良いものにしていく。こうした取り組みは単独ではできませんから、本学内の太陽電池や燃料電池、材料などの専門家の協力を得たり、地元企業と一緒に進めていこうと考えています。
――空飛ぶペンギンは、実際に救援物資や災害調査機材の運搬用に運用されることを目指しているのですね。最後に学生さんに向けてメッセージをいただけますか?
[棚橋教授]宇宙航空理工学科はまだ開設して間もない新しい学科で、最上級生が学部2年生です。3年生や卒研生は機械工学科の学生を担当しており、核融合の担当学生などは、超音速の流れなど、圧縮性流体に関する勉強から始めています。機械工学や電子工学から流体力学まで幅広い分野の専門知識を地道に積み重ねる必要があります。目の前に提示される知識のひとつひとつに深い関心を持ち、意義を感じながら学んでもらいたいと思います。
「不言実行、あてになる人間」というのが、本学の創設者三浦幸平の言葉です。学生には、自分の夢をしっかり持ってほしいですね。壁にぶつかっても簡単に諦めず、無限の可能性に向かって羽ばたいてほしいと思います。

関連リンク

ライタープロフィール
後藤 銀河
アメショーの銀河(♂)をこよなく愛すライター兼編集者。エンジニアのバックグラウンドを生かし、国内外のニュース記事を中心に誰が読んでもわかりやすい文章を書けるよう、日々奮闘中。










