- 2020-1-16
- 技術ニュース, 機械系, 海外ニュース
- DEAnsect, Herbert Shea, Science Robotics, エラストマー膜, スイス連邦工科大学ローザンヌ校(EPFL), スタンフォード大学, ソフトロボット, ナノファブリケーション技術, フォトダイオード, マイクロコントローラー, 人工筋肉, 学術, 昆虫ロボット, 誘電エラストマーアクチュエーター(dielectric elastomer actuators:DEA)

© 2019 EPFL
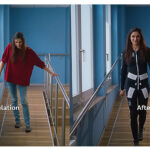
スイス連邦工科大学ローザンヌ校(EPFL)のHerbert Shea教授を中心とする研究チームは、2019年12月18日、どのような地形でも秒速3cmで移動する超軽量の昆虫ロボット「DEAnsect」
を開発したと発表した。この昆虫ロボットは人工筋肉を使用しており、折り畳まれたりつぶされたりしても動き続けるという。研究成果は、2019年12月18日付『Science Robotics』誌で発表されている。
この研究ではソフトロボットを2種類開発したという。1つ目は、極細ワイヤーでつながれたロボットで、非常に頑丈なロボットだ。折り畳んだり、ハエたたきでたたいたり、靴で押しつぶしたりしてもその動きに影響を及ぼすことはない。
2つ目は、ワイヤーなしで動作する自律型ロボットだ。バッテリーと電子部品全てを背面に搭載し、重量は1g未満。このインテリジェントな昆虫ロボットは、指令を出す頭脳となるマイクロコントローラーと眼の役割を果たすフォトダイオードを装備。白黒模様を認識でき、地面に描かれた線をたどることができるという。
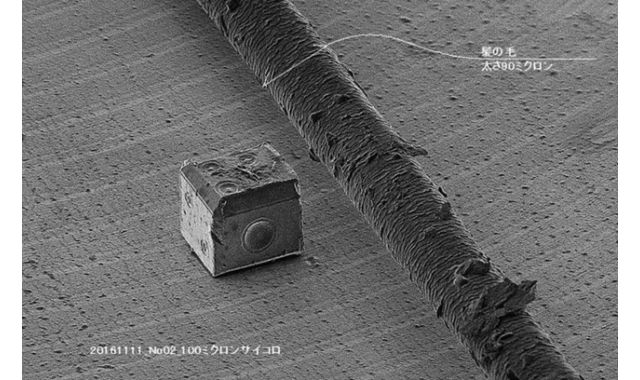
DEAnsectが動く仕組みは振動推進だ。DEAnsectは、髪の毛と同じぐらい細い人工筋肉の一種である誘電エラストマーアクチュエータ(dielectric elastomer actuators:DEA)を搭載しており、DEAは振動によって前方へと推進させる。このDEAを採用したことで、昆虫ロボットは軽量かつ素早く動くことができ、どのような形状の表面でも移動可能だという。
人工筋肉は、2つの柔らかい電極の間に挟まれたエラストマー膜で構成されており、電圧をかけると電極が互いに引き付けられて膜を圧縮し、電圧がオフになると元の形状に戻る性質を持つ。
昆虫ロボットにはこの人工筋肉から成る脚が3本あり、毎秒400回以上という高速で電圧をオン/オフ切り替えすることで昆虫ロボットの動きを発生させている。
研究チームは、ナノファブリケーション技術を使用して、エラストマー膜を薄くし、厚みがわずか数個分の分子程度の柔らかく導電性の高い電極を開発した。この薄さを達成したことで、人工筋肉が比較的低い電圧でも動作するようになったという。
また、低電圧で動作するということは、電源サイズの縮小にも直結する。「通常、DEAは数kVで動作し、大きな電源ユニットが必要になります。我々の設計では、重量わずか0.2gのロボットの背面に必要なものを全て装備できます。この技術は、ロボット工学においてDEAを幅広く利用する新しい可能性を切り開きます。インテリジェント昆虫ロボット群や、点検あるいは遠隔修理などへの利用、さらには昆虫ロボットを昆虫コロニーに送り込んで一緒に生活させ、昆虫コロニーについてより深い知識を得るといった可能性です」とShea教授は語る。
現在、研究チームは、米スタンフォード大学と共同で、ワイヤーなしの完全にソフトな昆虫ロボットを開発している。長期的には、昆虫ロボットに新しいセンサーとエミッターを取り付けて、昆虫ロボット同士が直接、相互に通信できるようにする予定だという。