岡山大学は2020年2月3日、海上技術安全研究所との共同実験において、自律型水中ロボット(AUV)と海底ステーションの自動ドッキングに成功したと発表した。
同大学によると、深海用水中ロボットは、水中汚染物の発見/回収や深海地形調査/資源回収、水産資源育成/捕獲などのさまざまなニーズがある。しかし、風や波浪の影響を受けやすい海上での投入/揚収作業が必要であったり、海底での充電が難しいために海底などでの作業時間に制限があるなどの課題があった。
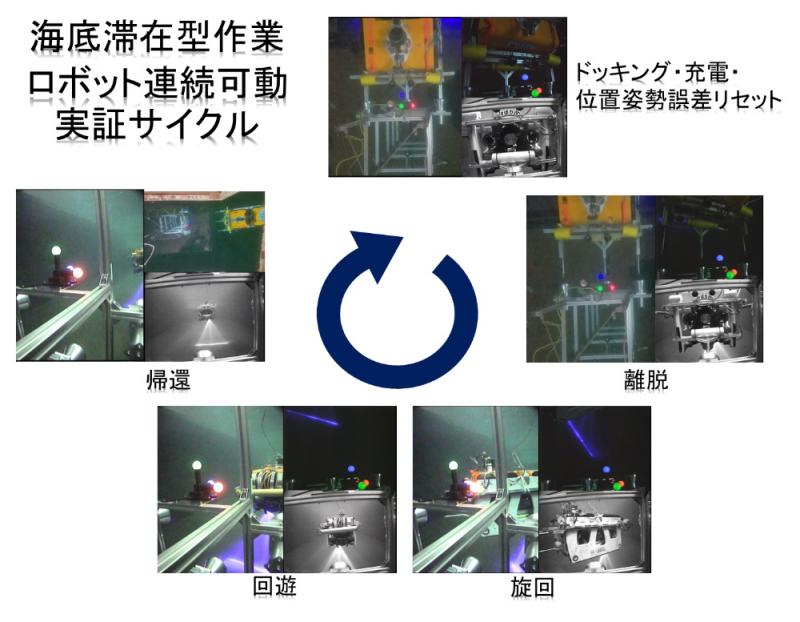
今回の共同研究は、海上技術安全研究所が海底熱水鉱床調査用に開発し、深度2000mまで潜航可能なホバリングタイプの自律型無人潜水機「ほばりん」に、同大学が開発した実時間複眼3次元立体認識(3D-MoS、 3 Dimension Move on Sensing)を搭載し、動揺水槽内における自動ドッキングの実証実験に成功した。
3D-MoSは、ビデオレートで入力される左右複眼中の対象物を、動画像列の入力速度に遅れることなく認識し、3次元立体対象物の3次元位置姿勢を計測し、位置姿勢を制御する技術だ。今回の実験では、複眼構成3D-MoSと発光3Dマーカーを組み合わせた自動嵌合システムを、海底での作業実績を持つほばりんに搭載して実際に嵌合可能なことを実証した。
今回の実験で実証されたドッキング技術により、風波などの影響が少ない海中でのAUVの投入/揚収作業が可能になる。また、同技術を用いて海底で自動充電することによって、さらに長時間海底で作業できる自動ロボットの実現につながる。