- 2021-8-24
- 制御・IT系, 機械系, 研究・技術紹介, 電気・電子系
- JAPMANY(Japan-Germany)製品, Norbert Sporer, SENSO-Joint, SENSODRIVE(センソドライブ), スカラロボット, ステア・バイ・ワイヤ・システム・ビークル, 医療用マイクロスコープ, 協働ロボット, 外骨格スーツ, 産業用ロボット

SENSODRIVE CEO Norbert Sporer氏
「産業用ロボット」といえば、どのようなロボットを思い浮かべるだろうか。日本は製造業を中心に大量生産、省力化などの目的で、生産ラインへ導入する大型産業用ロボットで世界をリードしてきた「ロボット大国」というイメージがある。近年では、この生産のトレンドが大量生産から多品種少量生産へと急速にシフトしつつあり、従来型の産業用ロボットとは異なる、AI制御によってフレキシブルな運用が可能な自動化ソリューションとして、人間の作業員と協業したり、その作業と置き換えたり、作業員と同じ作業を繰り返し行ったりする「協働ロボット」が注目を集めるようになってきた。
今回、「安全で高性能な協働ロボットを実現する」と題して、トルクセンシングロボットジョイント技術をコア技術として、ドイツで最先端のロボット技術開発を行うSENSODRIVE(センソドライブ)のCEO Norbert Sporer氏に、オンラインでお話を伺うことができた。全2回とし、第1回目はSENSODRIVEの主力商品である、協働ロボット向けトルクセンシング駆動ユニット「SENSO-Joint」をご紹介いただいた。
<プロフィール>
Norbert Sporer(ノルベルト・スポラー)氏
ミュンヘン応用科学大学とミュンヘン工科大学で電気工学を学び、ミュンヘン工科大学の制御・フィードバック工学部門にて開発エンジニアとしての知識を深めた。
1994年、ドイツ航空宇宙センターのロボット工学・電子工学研究所の軽量ロボット開発の責任者となり、自身のアイデアでロボット工学の新基準を打ち立てた。
2003年、SENSODRIVEの共同設立者・CEOを務め、今日に至る。
――初めに、御社について簡単にご紹介いただけますか。
[Norbert Sporer氏]SENSODRIVE(センソドライブ)は、2003年にドイツ航空宇宙センターからスピンオフした企業で、宇宙用ロボット技術を用いた産業用ロボットを開発することをミッションに掲げている、協働ロボット向けのロボットジョイント領域におけるマーケットリーダーです。
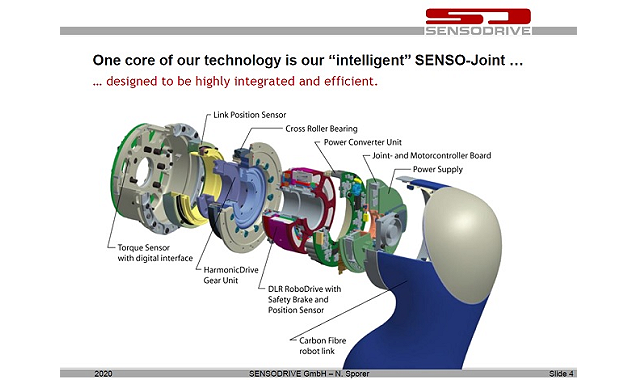
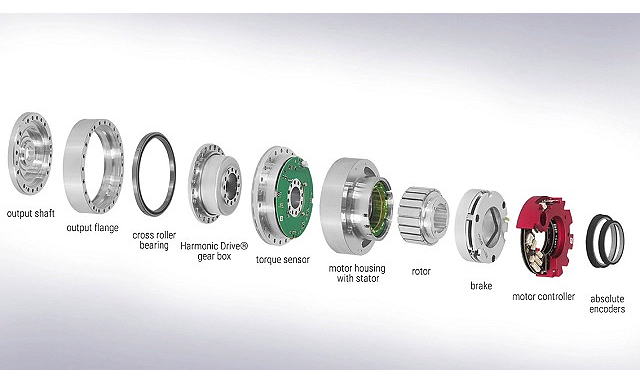
弊社では、ロボティクス向けにトルクセンサー、ハーモニックドライブ・ギアボックス、出力軸受、強力なモーター、角度エンコーダー、モーターコントローラーを統合したトルク制御駆動装置「SENSO-Joint(センソジョイント)」を開発・生産しています。SENSO-JointはSENSODRIVEの主力製品で、人間と安全に協業するロボットに触覚フィードバックを与える高感度な駆動を、世界最先端の安全性、軽量性、高速性で実現するものです。
トルクセンシング機構を組み込んだ駆動装置「SENSO-Joint」
[Sporer氏]私たちはロボットを製造するのではなく、ロボットメーカーとパートナー契約を結び、パートナーが安全な協働ロボットを開発できるよう、私たちの技術を提供することを目的としています。次世代型ロボット、協働ロボット、手術装置、遠隔操作システムを開発する企業向けに提供しており、これまで18年にわたって、KUKA、カールツァイス、BMW、ドイツ航空宇宙センター、アーヘン工科大学など、数多くの企業で採用されています。
トルクセンシングを使ったトルクダンピング技術で慣性や振動を除去できるのが特徴
[Sporer氏]トルクコントロールジョイントであるSENSO-Jointの主な用途としては、スカラロボット(アームが水平に動く水平多関節型産業ロボット)や、脳の外科手術などに使われる医療用マイクロスコープ向けなどがあります。医療用マイクロスコープは、30~40ポンド(約13~18キログラム)もある大型の顕微鏡ですが、脳腫瘍の除去など極めて繊細な顕微鏡手術を行うため、それをわずかな力で狙った位置へと移動させ、ブレないように保持する必要があります。この顕微鏡の重量をトルクコントロールで打ち消すことによって操作を軽くし、アクティブダンピング技術によって、視野のブレを抑えています。当社の現在の産業以外の事業領域としては、この医療系へのアプリケーションが中心となっています。
その他にも、作業者が重量物の運搬を可能にする外骨格スーツ(EXO-SKELTON)を航空業界向けの物流業者向けに開発したり、ハイエンドのシミュレータやステア・バイ・ワイヤ・システム・ビークルに当社のフォース・フィードバック技術を提供しています。
――スカラロボット、医療系器具、外骨格スーツ、そして自動車向けステア・バイ・ワイヤ・システムの、4つの事例をご紹介いただきました。幅広い分野に対応するアプリケーションを提供されていますが、コアとなる技術はすべて同じものなのでしょうか?
SENSO-Jointは各アプリケーションに合わせて構成やチューニングは変わるが、トルクセンサー、ギアボックス、モーター、エンコーダーなどを統合する駆動機構は共通だ
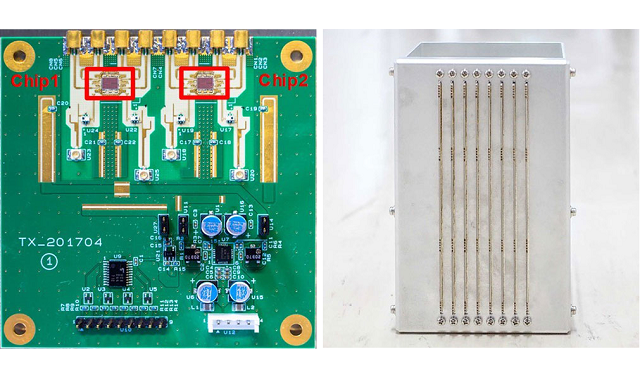
[Sporer氏]SENSO-Jointの主要コンポーネントは、ステーターとローターからなるモーター部分、精密な角度エンコーダー、組み込み型トルクセンサーという構成になっています。トルクセンサーの主な役割は、回転トルクの測定とアウトプットベアリングの保持、そしてギアボックスとの接続です。トルクセンサーで計測された信号は組み込まれた制御回路へと伝達され、モーターをコントロールします。これにより、各アプリケーションで必要とされる高度な制御を実現しています。同時に、極めてコンパクトな設計により、ロボットアーム内のスペースを最小限に抑えることができます。

SENSO-Jointの構造を紹介するSporer氏
[Sporer氏]SENSO-Jointは、5種のサイズ、3種のトルクセンサーの合計15種類の組み合わせが用意されていますが、基本的には同じテクノロジーですべての用途に対応しています。適切な仕様のSENSO-Jointを選ぶだけで、外骨格スーツにもステア・バイ・ワイヤ・システムにも、そのまま適用できる高い汎用性を備えています。
――ステア・バイ・ワイヤへの適用も可能とのことですが、具体的にどのようなシステムを開発されているのでしょうか?
[Sporer氏]ステア・バイ・ワイヤは、通常の車両のステアリングシステムを電子的に置き換えるものです。通常のステアリングは、左右の前輪をつなぐステアリングシステムとドライバーが操作するハンドルとが、ステアリングシャフトで機械的に接続されています。ステア・バイ・ワイヤでは、ハンドルにはステアリングシャフトではなくSENSO-Jointが接続され、ドライバーのハンドル入力を検出し、ステアリングシステムに接続されたアクチュエータ(マスター・スレーブとして機能するSENSO-Jointあるいは電制パワーステアリングユニット)を制御し、ハンドルに対しては、適切なフォースフィードバックを行います。
BMWの自動車向けステア・バイ・ワイヤ・システムはまだ試作段階にありますが、同社の自動操縦オートバイのプロトタイプ向けにステアリングコントロールユニットを開発しています。

無人走行が可能なBMWの自動操縦コンセプトバイク。ステアリング機構にはSENSODRIVEが開発したコンポーネントが組み込まれている。出典:BMW
マスター・スレーブ構成にすることで遠隔操作アプリケーションにも対応可能
[Sporer氏]同様に、このマスター・スレーブ形式のアプリケーションは、医療用ロボットにも応用可能です。最近では他の病院に設置された医療ロボット(スレーブ)を、手元にある医療ロボット(マスター)を操作することで、遠隔地での手術をリアルタイムで行うといったケースへの適用が検討されています。特に近年のCOVID-19のパンデミックによって、人が直接触れないリモート制御に対する需要が高まっています。
――基本的に同じプロダクトで多様なアプリケーションに対応するということですが、例えば医療機器と自動車用途では求められる安全性や耐久性、耐環境性などは違うでしょうし、領域ごとに異なる性能要件があるかと思います。
[Sporer氏]SENSO-Jointの大きな特徴として、最も高い要求値である医療器具用スタンダードを満足する安全機構がジョイントそのものに組み込まれています。そのため、他の領域で求められるスペックを満足することは難しくありません。もちろん、必要に応じてインハウスで設計を変更し、カスタマイズしたものを提供可能ですが、主要なコンポーネントは、日本もしくはドイツ製であり、私はこれをJAPMANY(Japan-Germany)製品だと考えています。
次回後半では、「協働ロボットに求められる安全性」を中心にご紹介します。