- 2021-11-18
- 技術ニュース, 機械系, 海外ニュース
- 3Dプリンター, LiPoバッテリー, Science Robotics, Yasemin Ozkan-Aydin, ノートルダム大学, 多脚ロボット, 学術, 群ロボット
米ノートルダム大学の研究者らは、群ロボットとしても機能する多脚ロボットを開発した。1台では脚が引っ掛かったりして通過できない凸凹道や段差も、数台が連結することで進むことができる。捜索および救助活動、輸送、宇宙探査、環境モニタへの応用が期待される。研究結果は、2021年7月28日付けの『Science Robotics』に掲載されている。
アリやミツバチ、鳥は、時に集団で行動して困難を解決し、障害物を克服する。Yasemin Ozkan-Aydin助教授はこうした生物学的システムから着想を得て、脚を備えたロボット同士を物理的に接続することで、集団システムの地上での機動力を高められると仮説を立て、複雑な地形の横断や物の運搬など、難しいタスクも集団で行う多脚ロボットを開発した。
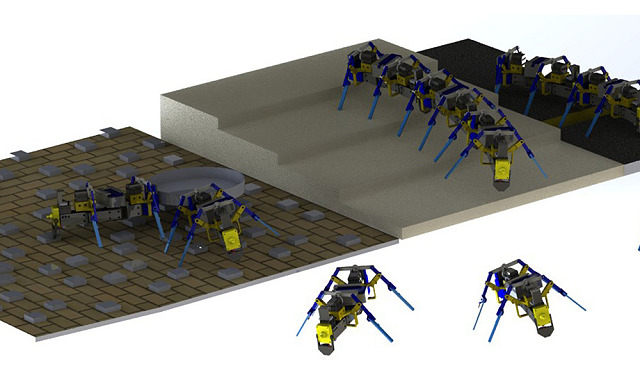
個々のロボットは、平らな面を動き、軽い物を運ぶといった簡単な作業は行える。もしもロボット1台の能力を超える作業の場合は、ロボット同士が物理的に接続して、より大きな多脚システムを形成し、集団で課題を達成する。
ロボットは3Dプリンター製で、体長は15~20cm。各ロボットには、LiPoバッテリー、マイコンなどを搭載している。さらに、ロボット同士が連結できるように、光センサーを前に1つ、磁気タッチセンサーを前後に1つずつ搭載する。4本の脚は、複雑なセンサーや部品がなくても、ある程度機械的に正しく動けるように柔軟性を持たせた。
1台のロボットが階段や凸凹道で動けなくなると、他のロボットに光信号を送信して救助を待つ。そして、光を検知して新たにやって来たロボットと連結することで、障害物を乗り越えて進むことができた。また、庭に落ちた小枝や葉っぱの上、板の隙間など、1台では脚が引っ掛かって進めなかった道も、2台、3台とつなげると乗り越えられることを確認した。もし脚の1本が折れていても、複数台がつながれば、他の脚が動きを補完してくれる。
システムの制御、センシング、電力性能の面で改善点はあるが、低コストの脚付き群ロボットの設計に役立つと、Ozkan-Aydin助教授は考えている。実世界でこの種のシステムを持続的に利用するために、バッテリー技術の改善も挙げている。理想的には10時間以上駆動し、より多くの電力を供給できる小型バッテリーが必要だという。
「ロボット工学を通じて、我々は生物学的システムのダイナミクスと集団行動をより理解できるようになる。そして、将来このような技術をどのように活用すべきかを探求できる」と語っている。