- 2021-12-22
- 技術ニュース, 機械系, 海外ニュース
- 3Dプリント, David Lentink, Mark Cutkosky, SNAG(Stereotyped Nature-inspired Aerial Grasper), Stereotype, スタンフォード大学, ドローン, ハヤブサ, フローニンゲン大学, ロボット, 学術
物品の輸送、農薬の散布、災害の被害確認、軍事目的など、ドローンの用途が広がり続けている。さらにドローンの用途を拡大しようと、このほどスタンフォード大学の研究チームが、木の枝などの不規則な形状の物体をつかんで止まれるように、ドローンに搭載するロボットを開発した。
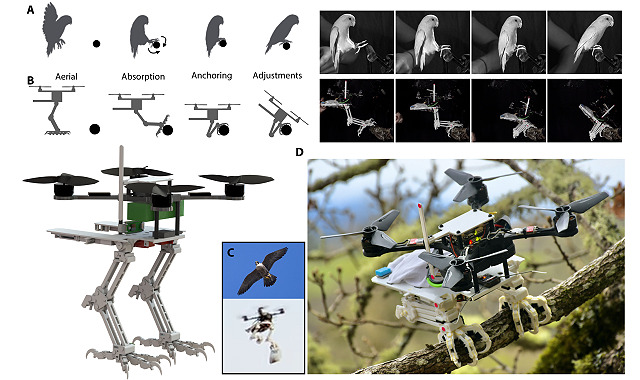
スタンフォード大学のMark Cutkosky氏とオランダのフローニンゲン大学に在籍するDavid Lentink氏は、ハヤブサが高速で爪を使って獲物を捕らえ、着陸時に物体をつかむ方法に注目。ドローンが平らではない表面にでも着陸したり、飛行中に物体を捕らえたりすることを可能にするロボット「SNAG(Stereotyped Nature-inspired Aerial Grasper)」を生み出した。
SNAGは、ハヤブサの脚の構造を模倣して作製された。3Dプリントされた脚の骨格と、筋肉の働きをするモーターによって、SNAGは着陸時に吸収した衝撃を、腱の働きをするワイヤーを通じて、20ミリ秒もの速さで木の枝をつかむ動作に変換できる。「Stereotype」という単語をSNAGに含めたのは、すべての鳥が着陸時に行う決まった動作を、SNAGが同様に行うからだという。
「SNAGの場合、ヘリコプターのようなゆっくりとした着陸ではなく、動的な着陸です。言わば、制御された衝突のようなものです」とLentink氏は言う。「爪が物体や表面をつかんだ後、足首が固定されます。ロボットの停止を加速度計が検知すると、バランス調整アルゴリズムが腰のモーターを使ってロボットを安定させます。そしてSNAGは、腱の張力を減少させることでつかんだものを放し、爪を開いた状態に戻して再び飛び立ちます」
ドローンがさまざまな表面で“休む”ことができるようになれば、着陸と上昇を繰り返す必要がなくなる。また空中で静止するためのホバーリングをせずに済むため、ドローンのバッテリー消費を減らせるという。
Cutkosky氏とLentink氏は、主に熱帯雨林の生態系を監視するためのプラットフォームとしてSNAGを設計した。野生動物を監視する移動式カメラや山火事の早期警報システムとしての利用を想定している。
さらにLentink氏は、SNAGを「ドローンハンター」としても活用したいと考えている。「例えば、近くでドローンが飛行していたために、ヒースロー空港が閉鎖されてしまったというような問題が考えられます。ドローンを撃墜しなくても別のドローンで捕まえることができたら役に立つでしょう」(Lentink氏)