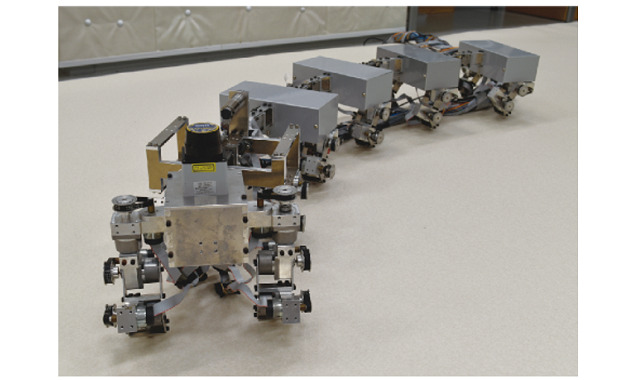
大阪大学は2023年5月29日、不安定性を利用して、多足ロボットの歩行を機敏かつ効率的にする技術を開発したと発表した。
多足ロボットは耐故障性や転倒回避性に優れる反面、多くの足の運動制御が難しいという課題があった。
同大学では以前から、回転バネを用いた柔軟な体軸の多足ロボットにおいて、そのバネ剛性をパラメータとするピッチフォーク分岐によって、体軸を真っ直ぐにして歩く際に不安定になり、バネの剛性に依存した半径の円歩行に遷移していくことを明らかにしていた。
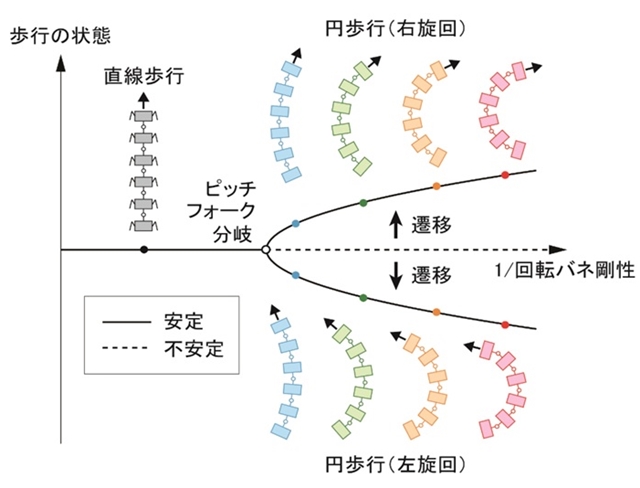
多足ロボットの体軸の回転バネ剛性に応じた安定な歩行の変化
不安定性は運動の継続を阻害する要因となるため、一般的にはそれを排除する方向で制御系を設計する。しかし今回の研究では、新たに体軸の回転バネの剛性を変化させる機構を搭載することで、不安定性を自在に引き起こし、さらに、遷移する円歩行の半径を目的とする場所に到達するよう制御。これにより多足ロボットの機敏かつ効率の良い歩行を実現させた。この機構は複雑な計算が不要で、しかもエネルギー消費も少ないという特徴を持つ。
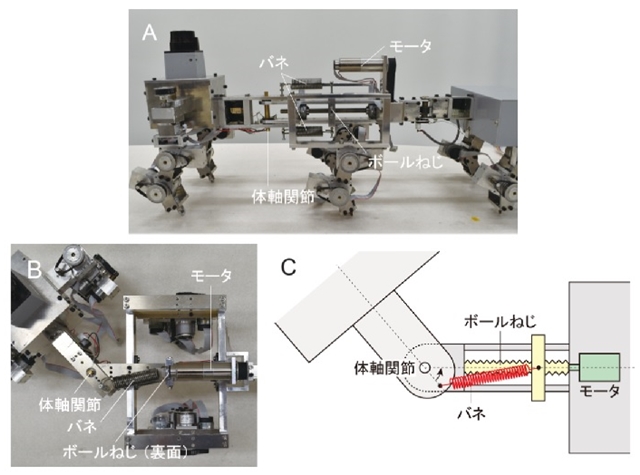
多足ロボットの体軸の剛性を変化させる機構(A:側面,B:上面,C:上面概要図)。
ボールねじを用いてバネの伸び縮みを制御することで体軸関節の剛性を変化させる。
多足ロボットはその優れた特徴からさまざまな場所での活用が期待されている。今回の研究成果により、機敏で効率の良い歩行ができる多足ロボットの実現が可能になり、立ち入ることが難しかった災害現場や惑星探査など、より多様な場所や状況への応用が期待される。