ラティス・テクノロジーは2024年4月2日、大型機械製品向け3D機構検証ソフト「XVL Kinematics Suite」のVer.22.1において、干渉検証漏れ防止機能を提供すると発表した。Ver.22.1は、同月15日より提供を開始する。
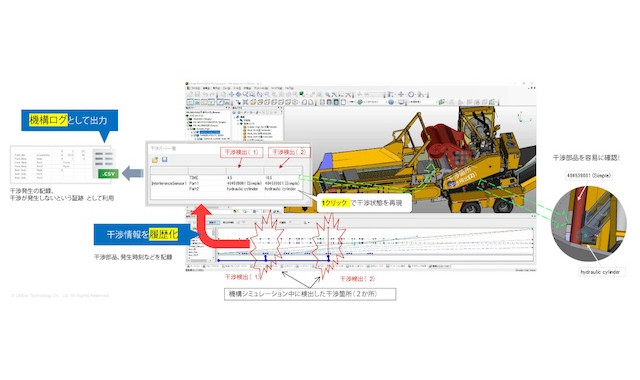
同機能は、動く3Dモデル上で部品間の干渉を検出し、干渉している箇所の対象部品や発生時刻、位置を履歴化するものだ。
部品点数1万点超の大規模モデルにおける干渉個所を全て履歴として残すことが可能。それらのうちの1つをクリックすることで干渉状態を3D上に再現できる。
課題をCADで修正し、機構シミュレーションをソフト上で再び実行することで、干渉箇所の修正漏れを防止できる。
また、履歴情報の中から、シミュレーションで検出した干渉発生時の干渉情報や機構状態をCSV出力可能。干渉発生の記録や、干渉が発生しない証跡として活用できる。
関連情報
3D機構検証ソフト「XVL Kinematics Suite」で干渉検証漏れ防止機能を開発 ~履歴化で干渉状態を簡単再現~ | 2024年 | ニュース | ラティス・テクノロジー株式会社