朝日サージカルロボティクス株式会社 代表取締役社長 安藤岳洋氏
ロボットと言えば、スターウォーズに出てくるような人型ロボットから、いろいろな部品や器具を使いながら製品を組み立てる産業用ロボットまで、様々な形態のものがありますが、本連載の第1回目では「臨床の現場で医師をサポートする医療ロボット」について取り上げ、医療ロボットは私たちがよく知る産業用ロボットとは違う仕組みや役割を持っていることが分かりました。
こうした医療ロボットでは、開発行為も医療系特有の難しさがあります。第2回は、「産業ロボットと医療ロボット、その違いとは」と題し、朝日サージカルロボティクス株式会社代表取締役社長の安藤岳洋氏にお話を伺いました。(執筆:後藤銀河、写真・画像提供:朝日サージカルロボティクス株式会社)
<プロフィール>
朝日サージカルロボティクス株式会社 代表取締役社長 安藤岳洋氏
2012年 東京大学大学院工学系研究科修了
2012年 同大医用精密工学研究室助教
2015年 株式会社A-Traction創業 代表取締役社長に就任
2021年 朝日インテック株式会社による子会社化が完了、社名を朝日サージカルロボティクス株式会社に変更
――医療関連機器の開発に携わったきっかけ、経緯について、ご紹介いただけますか?
[安藤氏]大学生時代は電子機械工学科で、生体に関わっていたわけではありませんでした。ですが、生物に関わりたいという思いがあり、それに近いところで医療機器を研究する医用精密工学研究室に所属し、2012年に博士課程を修了後、3年間助教として勤務していました。
その研究室で、様々なモノを作りましたが、研究者のゴールは論文を書くことです。何人もの医師と関わり、様々な機器を開発しても、大学では臨床の現場に届くものは作れませんので、それがジレンマでした。
起業することで研究成果の製品化を目指す
――前回、医療ロボット開発のきっかけは「医工連携」だったとお聞きしました。
[安藤氏]多くの医療機関では、医療に関する研究開発を行えるような体制がありませんが、医師によっては医療技術の向上、進歩のために医工連携の基盤を作りたいという考えを持たれている方もいます。医療現場のニーズ、課題を解決するための研究はできますが、あくまで研究止まりで、実際に世の中に出てくる製品が作れるわけではありません。
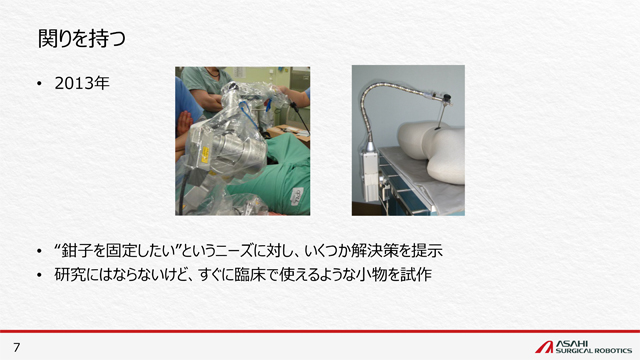
きっかけは「医工連携」。ただし製品化には大きな壁があったという。画像提供:朝日サージカルロボティクス株式会社
[安藤氏]2014年頃、研究だけではなく、何か製品化できないだろうかと考え始めていたところ、医療系ベンチャーキャピタルからのお話があり、それをきっかけとして、医療ロボットにフォーカスして起業することにしました。スタート時は、医師と私を含めたエンジニア2人の計3人という体制でした。
――ベンチャーとして起業し、医療ロボットを開発、製造するための資金を調達されたわけですね。
[安藤氏]国立がん研究センター東病院大腸外科の医師と週に2、3回会ってディスカッションして、臨床現場のニーズは何か、現状の課題に対しての技術的な解決案についての議論を半年ほど続けました。
――現在開発中のロボットは自社で開発、生産されるのですか?
[安藤氏]鉗子の先端部分は親会社の朝日インテックが製造を担当していますが、その他のロボット部分は、すべて内製で作っています。エンジニアとしては、私がメカもエレキもソフトウエアも見ていて、他にメカが3人、ソフトウエアが2人、営業が1人います。会社としては現状9人の体制となり、全員が中途採用です。
製品立ち上げ当初は、年に数台レベルの生産規模を想定しており、自社で全てカバーする予定です。うまく軌道に乗れば年数十台まで増えるとみていますが、徐々に親会社で生産できるよう、移行していくことを考えています。
医療機器として高いレベルの安全衛生管理が求められる
――医療ロボット特有の難しさとは、どのような点ですか?
[安藤氏]医療ロボットは手術という、特に人体、体内に近いところで使用する機器なので、厳密な安全規格が多くあります。産業用ロボットは人間と離れたところで使えばいいので、安全についての考え方から異なると言えるでしょう。運用時も滅菌が必要なため、普通のロボットや設備機器とは異なるレベルの取り扱いが必要になります。
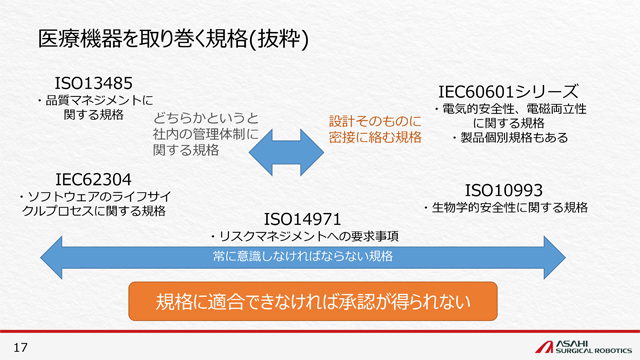
医療機器開発では、多くの安全規格というハードルを越える必要がある。画像提供:朝日サージカルロボティクス株式会社
[安藤氏]私たちは医師免許を持った医療従事者ではありませんから、医療ロボットのユーザーにはなりえません。医師の意図をくみ取って、何を言っているのかを理解しなければモノが作れないというのは、スマートフォンやテレビといった一般の民生機器とは違う点でしょうね。
ニーズを理解するため、ある程度の医学知識は必要
[安藤氏]私は医療系の機器を開発する研究室にいましたが、配属当初は専門的なところが分からず、論文を読んで勉強したり、病院のカンファレンスに参加したり、手術を見学したり、学会に参加したり、ということを繰り返しながら、徐々に医学的な知識を身に着けてきました。弊社のエンジニアも、半数以上は医療系としての経験はありませんが、ロボットの主要な部品を作るときには、医師との会話についていかなければならないので、最低限の医学的な知識は理解してもらうようにしています。
――医療は専門性、特殊性の高い領域であり、同時に高い安全性も求められるということですね。他にどのような違いがありますか?
[安藤氏]実は医療ロボットは産業用ロボットのように自動で動いて何か作業することはありません。現状の医療ロボットは、ダビンチ含めて「完全操作型」なのです。これは、医療ロボットは自動化が難しいという課題があるからです。
自動車であれば、手放しで走行する自動運転車も登場していますが、自動運転車は道路の白線の間を走行したり、地図に描かれたデータや決められた範囲を走行するように設計されています。これに比べると、人間の体の中は内臓や血液などが常に形状変化していて、その形状や大きさも人によって異なります。また、手術の手順も正解が一つではなく、いろいろありますから、それをどのように学習させるのかも課題でしょう。
――確かに体の中には道路のように標識も地図もありませんね。他に開発時に注意された点はありますか?
[安藤氏]医療ロボットは、繊細な作業とシンプルな操作を両立させる必要があります。そのため、アームの切り替えなどにおいて、ボタン操作は極力なくし、ジェスチャーで動かせるようにしています。これは、インターフェースとして、自分の手と同じように動かせることにメリットがあると考えたからです。操作をシンプルにするため、1つの入力部に2つの機能を割り当てることで入力を少なくするようにしました。
また、手術は長時間になる場合があるので、疲れにくく、できるだけ自然に使えるようにすることも重要だと考えました。術者は棒状の術具の先端で繊細な作業をすることには慣れています。そのため、操作方法さえ理解していただければ、通常の両手の作業に加えてフットペダルの作業が増える程度の感覚で使っていただけると考えています。実際に、これまでデモをしてきた医師からも「非常に使いやすい」という評価をいただいています。
次回は、「医療ロボットの今後と、開発に求められるエンジニア像とは」と題してお話を伺います。
取材協力

ライタープロフィール
後藤 銀河
アメショーの銀河(♂)をこよなく愛すライター兼編集者。エンジニアのバックグラウンドを生かし、国内外のニュース記事を中心に誰が読んでもわかりやすい文章を書けるよう、日々奮闘中。