- 2018-2-19
- 技術ニュース, 機械系, 海外ニュース
- Donald Ingber, Hayley McClintock, high-precision, milliDelta, millimeter-scale Delta robot, Robert Wood, Science Robotics, The milliDelta: A high-bandwidth, ハーバード大学ワイス研究所(SEAS), パラレルアームロボット(デルタロボット)
ハーバード大学ワイス研究所(SEAS)は2018年1月17日、世界最小のパラレルアームロボット(デルタロボット)を開発したと発表した。この研究成果は『Science Robotics』に論文「The milliDelta: A high-bandwidth, high-precision, millimeter-scale Delta robot」として2018年1月17日に掲載されている。
独立して制御できる3本の軽量アームを使い、中央のプラットフォームを3方向に高精度かつ高速に移動できるデルタロボットは、機械加工から商品包装など多くの産業用途に用いられている。これまで既存の構造のまま、より小さいスペースで作動できるよう小型化が検討されてきたが、成功には至っていなかった。
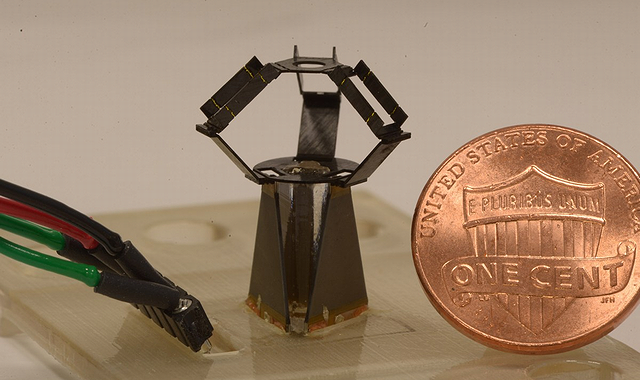
ワイス研究所のRobert Wood氏が率いるチームでは、飛び出す絵本や折り紙の仕組みにヒントを得て、複合材のフラットなシートからロボットを組み立てる「Pop-up MEMS」製造プロセスを研究してきた。今回このプロセスを適用し、わずか7.01立方mmの作業エリアを実現するマイクロロボット「milliDelta」の開発に成功した。milliDeltaの本体サイズはコイン程度の15×15×20mm、重さ430mg、ペイロードは自重の約3倍の1.31g、動作精度は5μm以下を実現している。
milliDeltaは、大型のデルタロボットに使用されている複雑なジョイント同様に機能する、埋め込み型屈曲ジョイントを備えた複合ラミネート構造を採用する。研究チームのHayley McClintock氏は、「組み立て治具を使ってラミネート構造を正確に折りたたみ、ミリスケールのデルタロボットに組み込みました。milliDeltaは動力に圧電アクチュエーターを採用し、一般的なデルタロボットよりも15~20倍も高速で作動します」と説明している。アームの動作速度は秒速0.45m、加速度は215m毎秒毎秒に達するという。わずかな作業スペースの中で高速動作が可能なため、マイクロサイズの精密部品の組み立て作業や人間の目の網膜の顕微鏡手術などへの応用が期待されている。
ワイス研究所所長のDonald Ingber博士は「Wood氏のチームがMilleDeltaの開発によって、デルタロボットの速度と制御をミリメートルスケールへと発展・実証したことは、工業用および医療用ロボット開発への新しい道を開くだろう」とコメントを寄せている。