- 2019-9-22
- 技術ニュース, 機械系, 海外ニュース
- Herbert Shea, Nature, Vito Cacucciolo, スイス連邦工科大学ローザンヌ校(EPFL), スマート衣料, 伸縮性小型ポンプ, 前田真吾, 学術, 新竹純, 東京工業大学, 流体筋肉, 自律型ソフトロボット, 芝浦工業大学, 軽量外骨格, 鈴森康一, 電気流体力学(EHD), 電気通信大学
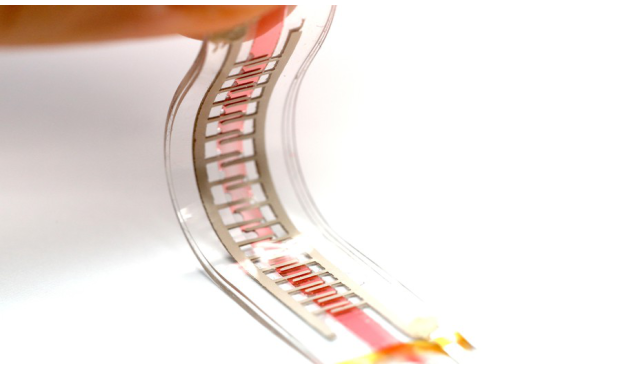
スイス連邦工科大学ローザンヌ校(EPFL)の研究チームが、バッテリー内蔵型の伸縮性小型ポンプを開発した。柔軟で静音、重量1gと軽量で、自律型ソフトロボット、軽量外骨格、スマート衣料などへの応用が期待される。この研究には、芝浦工業大学の前田真吾准教授、電気通信大学の新竹純助教らも参加している。研究結果は、2019年8月15日付けの『Nature』に掲載されている。
柔軟性と伸縮性を持ち、人体とも安全に作用するソフトロボットは、リハビリ用外骨格やスマート衣類などに理想的だ。ソフトロボットの駆動方法として、チューブとポンプを使って可動部に液体を流し込むものがあるが、そのポンプの多くは硬く、騒々しく、かさばるため、自律性に限りがあったり、着用が面倒だったりという課題がある。
研究チームが開発したポンプは、重量わずか1g、静かで、電極さえも柔軟性を持っている。電力は充電式電池を組み込んだ2×2cmの回路から供給し、消費電力も少ない。「これはソフトロボット界のパラダイムシフトだと考えている」と、共同研究者のHerbert Shea教授は語る。
ポンプを駆動させるメカニズムは、電荷注入の電気流体力学(EHD)に基づいている。これは、スーパーコンピューター向けの循環型液冷システムでも使われているという。
ポンプは直径1mmのチューブ状のチャネルを持ち、その中には電極の列が並ぶ。チャネル内は誘電性液体で満たされており、電圧を印加すると、電子は電極から液体にジャンプし、一部の分子が帯電する。帯電した分子は周りの分子も動かしながら、もう一方の電極に引き寄せられるように動き、結果としてチャネルの中に流れが生まれる。「電界を調整すれば流量速度を上げることができる。しかし、速度が上がっても静音を保っている」と、筆頭著者のVito Cacucciolo氏は語る。
研究チームは、ソフトロボット研究で広く使われているロボットフィンガーにポンプを埋め込み、自己完結型の「流体筋肉」の可能性も示している。さらに研究を進めるために、東京工業大学の鈴森康一教授の研究室とも共同研究を始めている。
柔軟性、伸縮性、静音、高速性に加えて、モジュール化が可能で拡張性が高いのも特徴だ。Shea教授によれば、大型のロボットを動かしたい場合は、複数のポンプをつなげればよいという。ウェアラブルのラボオンチップまたはマイクロ流体センサー、スマート衣料、軽量なパワードスーツ、自律型ソフトロボットでの利用が期待される。
関連リンク
A miniature stretchable pump for the next generation of soft robots