- 2023-6-5
- 制御・IT系, 技術ニュース
- AI, MAPF(Multi-agent Path Finding), ガンマ分布, パナソニック, ベイズ推論, ロボット, 確率分布, 自律走行ロボット, 走行経路
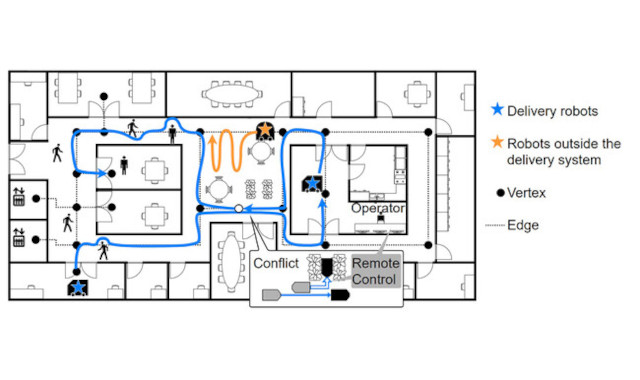
パナソニックホールディングスは2023年6月1日、自律走行ロボットが人や他のロボットを避けながら効率的な走行経路を計画できるAI技術を開発したと発表した。
複数のロボットが同じ場所で稼働していると、互いに衝突しないように減速や一時停止を繰り返すことになり、ロボットが移動する時間に遅延が生じる。
これまではグリッド状のグラフ上で複数のロボットが衝突しない経路を作成するMAPF(Multi-agent Path Finding)という手法が用いられていたが、遅延の確率分布を正確にモデル化できていることが前提で、実際に人やロボットが行き交う現実の生活や職場に用いることはできなかった。
この課題を解決するために同社は、ロボットが特定の経路を走行する際の遅延をパラメータが未知なガンマ分布に従うものと定義したうえで、走行中に得られる遅延の観測値を用いて、確率分布のパラメータをベイズ推論で遅延が観測されるたびに更新。推定したパラメータに基づいて最適な走行経路を作成する手法を開発した。この手法を用いて、シミュレーション実験を行ったところ、従来の手法に比べ、ロボット同士が鉢合わせする頻度が約半分になり、目的地までの移動時間が短い走行経路を計画できた。
同社は「人と複数の多様なロボットが共存する環境で、自律走行ロボットの活用シーンを広げる技術だ」としている。