- 2023-8-4
- 技術ニュース, 機械系, 海外ニュース
- The International Journal of Robotics Research, カメラ, グリッパー, スイス連邦工科大学ローザンヌ校(EPFL), ロボットアシスタント, ロボットアーム, 共用制御, 内蔵アクチュエーター, 内視鏡, 外科医, 学術, 腹腔鏡下手術, 触覚フィードバック, 触覚フットインターフェース
© 2023 EPFL
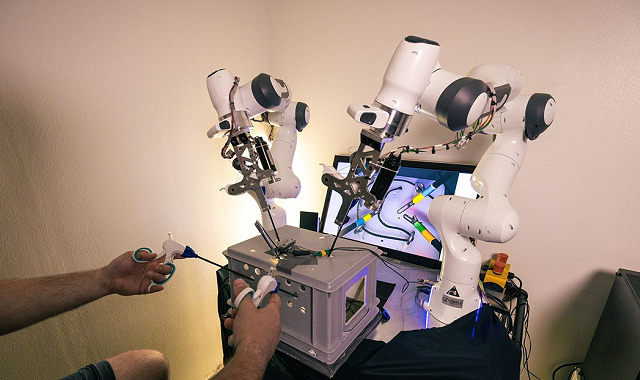
外科医が通常、自らの両腕で操作するロボットアーム2本に加え、両足でもロボットアーム2本を制御することで、アーム4本による腹腔鏡下手術を可能にするシステムが開発された。この研究はスイス連邦工科大学ローザンヌ校(EPFL)によるもので、2023年6月19日付で『The International Journal of Robotics Research』に掲載された。
今回の研究で開発されたのは、両腕で操作するロボットアーム2本に加え、5自由度の触覚フットインターフェースを使用して、追加のロボットアーム2本を外科医が操作できるシステムだ。両手で操作器具を制御し、片方の足で内視鏡とカメラを、もう片方の足でグリッパーを制御する。
このシステムは、外科医が4本の「手」で腹腔鏡下手術をするという新たな可能性を開くものであり、通常は2人、時には3人でする作業を1人でできるようにするという。
このシステムの重要な新機軸の1つは、外科医とロボットアシスタントとの間で制御を共有する共用制御だ。開発された制御フレームワークは、腹腔鏡下手術で求められる精度と安全性を満たしながら、複数の作業が同時に起こる作業空間内で、外科医とロボットが確実に協調して作業できるようにする。例えば、フットペダルに内蔵されたアクチュエーターは触覚フィードバックを返し、まるで目に見えない力場に従うかのように足を目標に向かって誘導する。また、誤った足の動きによって患者を危険にさらさないよう、力と動きを制限する。
さらに、足による制御をしやすくするため、カメラによる腹腔鏡器具の視覚追従と、グリッパー把持支援という2種類の支援モダリティを提案している。ロボットは外科医の意図を能動的に予測し、腹腔鏡器具を状況に応じて視覚追従することで、外科医の動作とロボットの動きを連携させ、積極的に外科医を支援する。例えば、外科医が結び目を作ろうとしているときに、外科医がどう動きたいかを予測し、内視鏡は適切な位置へと調節され、グリッパーは邪魔にならない位置に移動する。また、グリッパー把持支援により、組織をより正確に把持することができる。
このシステムの使いやすさと共用制御戦略の有効性を評価するため、現役の外科医12名に対してユーザー調査が行われた。その結果、両手との協調はもちろん、視覚追従と足の操作目標を含む作業において、集中的なトレーニングなしでも外科手術のような作業が実現可能であることが確認された。また、システムに実装された共用制御戦略は、腹腔鏡下作業中の作業負荷を軽減し、パフォーマンスを向上させて、連携を強化することが分かった。
専門医はすでにこのシステムでのトレーニングに成功しており、スイスのジュネーブでは臨床試験が進行中だ。