- 2018-12-27
- ニュース, 技術ニュース, 機械系, 製品ニュース, 電気・電子系
- H-MUSCLE, JPN, KYB, タフロボット, ブリヂストン, 低摺動油圧シリンダ, 小型シリンダ, 岡山大学, 形状可変ロボットハンド, 東京工業大学, 油圧アクチュエータ, 油圧ロボットアーム, 油圧駆動型ロボット用アクチュエータ, 研究, 立命館大学
東京工業大学は2018年12月26日、岡山大学、立命館大学、JPN、ブリヂストン、KYBと共同で、災害現場など厳しい環境でも動作する油圧駆動型ロボット用アクチュエータを開発したと発表した。
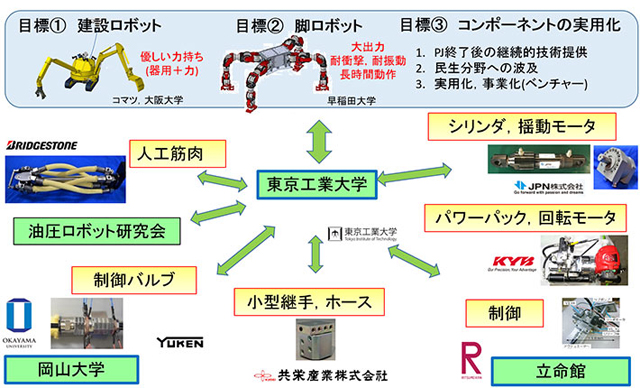
油圧アクチュエータ研究開発体制
現在のロボットの大部分は電気モーターで駆動するが、大出力で、衝撃に強く、悪環境でも動作するロボットの駆動には油圧アクチュエータが適している。しかし、パワーショベルなど一般産業機械用に開発された油圧アクチュエータは、ロボット用としては大きくて重過ぎるうえ、滑らかな動きや力の制御には適していなかった。
そこで、研究グループは今回、電動モーターに比べ、大きなパワーと耐衝撃/耐環境性を持ちながら、従来の油圧アクチュエータに比べ、小型/高出力で滑らかな制御性能を備えた油圧アクチュエータを開発した。
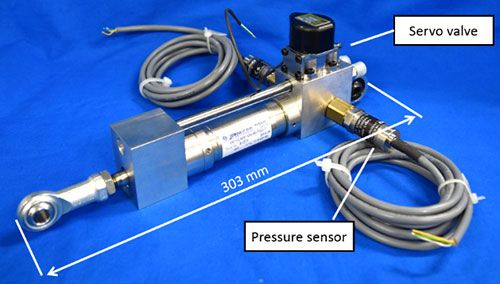
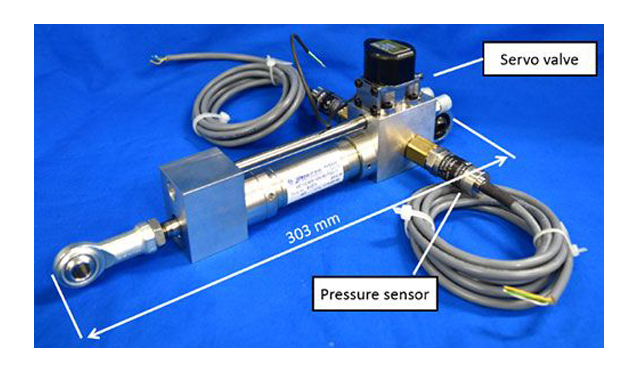
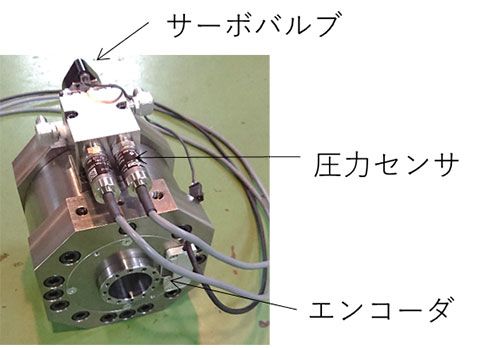
開発したシリンダの一例
開発したモーターの一例
開発したアクチュエータでは、ロボット用として小型のシリンダが求められていたことから、内径20mm~30mmの小型シリンダを用意。また、そのシリンダは、35MPa圧による駆動とチタン合金やマグネシウム合金の使用、設計の工夫により、高出力(高f/m比)を可能にした。さらに、ピストンとシリンダの間で用いるパッキンに、低摩擦のパッキンを採用。設計の工夫も行うことで、従来よりも10分の1程度に摩擦を抑えた。
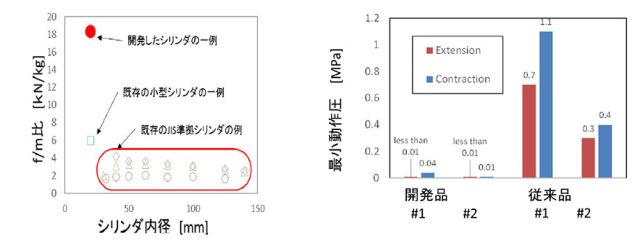
開発したシリンダと従来のシリンダとの比較
アクチュエータの評価のため、種々のタフロボットも試作。7軸の油圧ロボットアームを開発し、厚さ30mmのコンクリート板を3枚割るデモンストレーションを行った。また、 低摺動油圧シリンダと形状可変ロボットハンドを建設ロボットに搭載。そのロボットハンドが、様々な形状の物体を把持し、握る力を制御できることを確認した。

建設ロボットに搭載された低摺動油圧シリンダと形状可変ロボットハンド
なお、研究グループは、開発したアクチュエータの実用化の推進に向け、東工大発ベンチャー「H-MUSCLE(エイチマスル)」を設立。商品のサンプル出荷を2019年2月より開始するとしている。