タグ:ロボットハンド
-

農作物収穫用に「包み込む」ロボットハンドを改良 北陸先端科学技術大学院大学
北陸先端科学技術大学院大学(JAIST)は2024年9月26日、同大学が前年に開発した、物を包み込むようにつかむロボットハンドの非線形解析を行い、さまざまな種類の農産物を収穫できるよう改良したと発表した。 同大学は…詳細を見る-
-

-

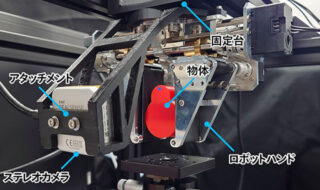
Thinker、近接覚センサー搭載のロボットハンド「Think Hand F」を「2023国際ロボット展」に出展
Thinkerが、ばら積みピッキングを可能にするカメラレスロボットハンド「Think Hand F」を「2023国際ロボット展」に初出展する。 Think Hand Fは、赤外線とAIによりカメラレスで物の位置と形…詳細を見る-
-
-

独航空宇宙センターと共同で、カスタマイズ可能なフィンガーモジュールの開発を開始 NSK
日本精工(NSK)は2023年11月17日、ドイツ航空宇宙センターと共同で、人手作業の自動化に貢献するフィンガーモジュールの開発を開始したと発表した。フィンガーモジュールの組み合わせで汎用性の高いロボットハンドを実現する…詳細を見る-
-
-
落とさずにつかんだものを回し続けられる、ロボットハンド制御技術を発表 パナソニック コネクト、中央大学
パナソニック コネクトは2023年10月19日、中央大学理工学部と共同で、つかんだものを落とさずに回し続けられる「ロボットハンド制御技術」を開発したと発表した。ロボットビジョン技術を生かし、フィンガとベルトを対象物の形状…詳細を見る-
-
-

カメラなしで暗闇でも操作できるロボットハンド――タッチセンシングと運動学習アルゴリズムを活用
高度な触覚と運動学習アルゴリズムを組み合わせ、視覚に依存せず物体を操作できる器用なロボットハンドが開発された。この研究は米コロンビア大学によるもので、2023年7月10〜14日に韓国で開催される国際会議「Robotics…詳細を見る-
-
-

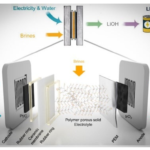
身近な素材で生分解性の人工筋肉を開発――パワードスーツの動力源もイメージ
使用後に廃棄して分解されるという、新しい種類のロボットアクチュエーター、つまり「人工筋肉」が開発された。この成果は、マックスプランク知能システム研究所を中心としたグループが、2023年3月22日付の『Science Ad…詳細を見る-
-
-

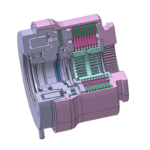
多指多関節ロボットハンドを小型軽量化する、高トルク小型モーターを開発 OKIマイクロ技研
OKIマイクロ技研は2023年3月22日、直径12mm、全長25.5mm、質量16.5gの高トルク小型モーター「Thumbelina(サムベリーナ)」を発表した。トルク定数が従来の同サイズに比べ2倍高い超小型高トルクブラ…詳細を見る-
-
-
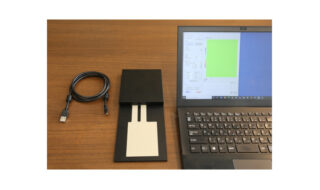
「摩擦・せん断力センサー」評価用キットのレンタルを開始――3方向の力を多点で同時検出する力覚センサー NISSHA
NISSHAは2021年5月24日、同社が開発した「摩擦・せん断力センサー」評価用キットのレンタルを開始したと発表した。 摩擦・せん断力センサーは、垂直方向の圧力と水平方向の摩擦力およびせん断力の3方向の力を同時に…詳細を見る-
-
-

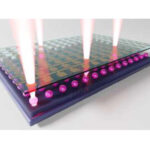
光と機械学習を組み合わせ、人間の指のような触覚を持つロボットフィンガーを開発
コロンビア大学の研究チームは、光と機械学習を組み合わせて、高感度のタッチセンサーを備えたロボットフィンガーを作製した。人間の指先のように表面は曲面だが、1mm未満の精度で接触位置を検出できる。研究結果は、2020年2月2…詳細を見る-
-
-
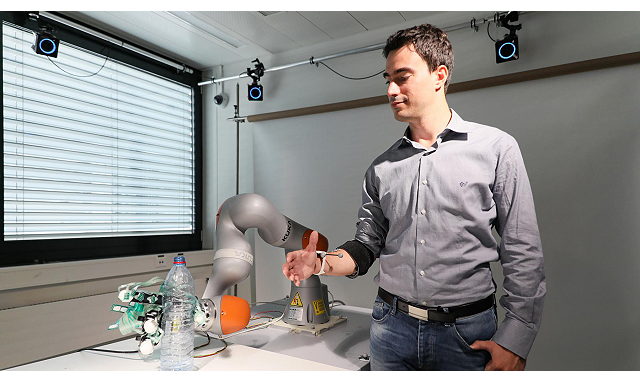
ユーザーによる制御とロボット制御を組み合わせた新しい義手――神経工学とロボット工学の融合
ユーザーの自発的制御とロボット制御を組み合わせた新しい神経制御義肢技術のテストが行われ、成功した。この研究は、スイス連邦工科大学ローザンヌ校のLearning Algorithms and Systems Laborat…詳細を見る-
-